반응형
최종 코드
/******************************************************
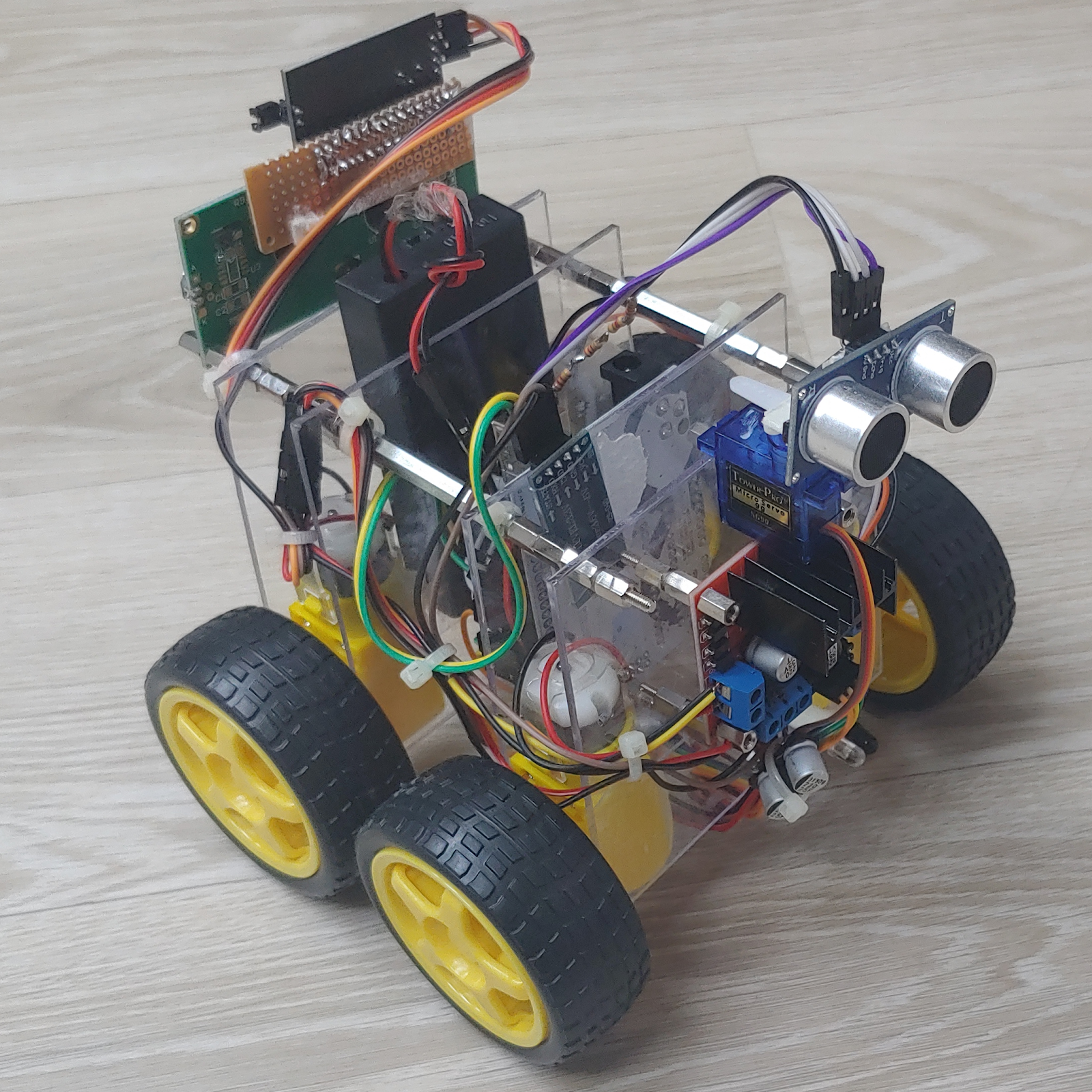
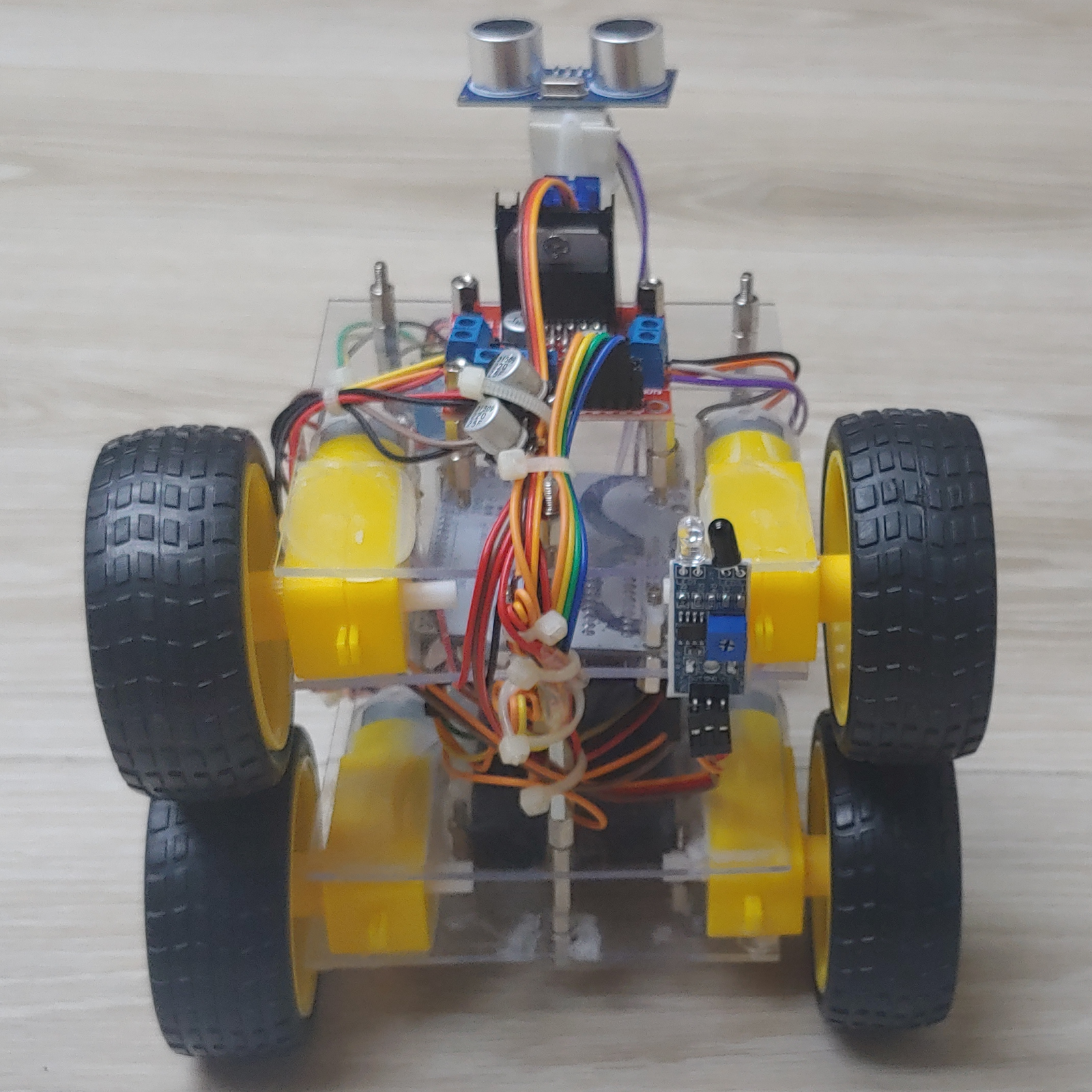
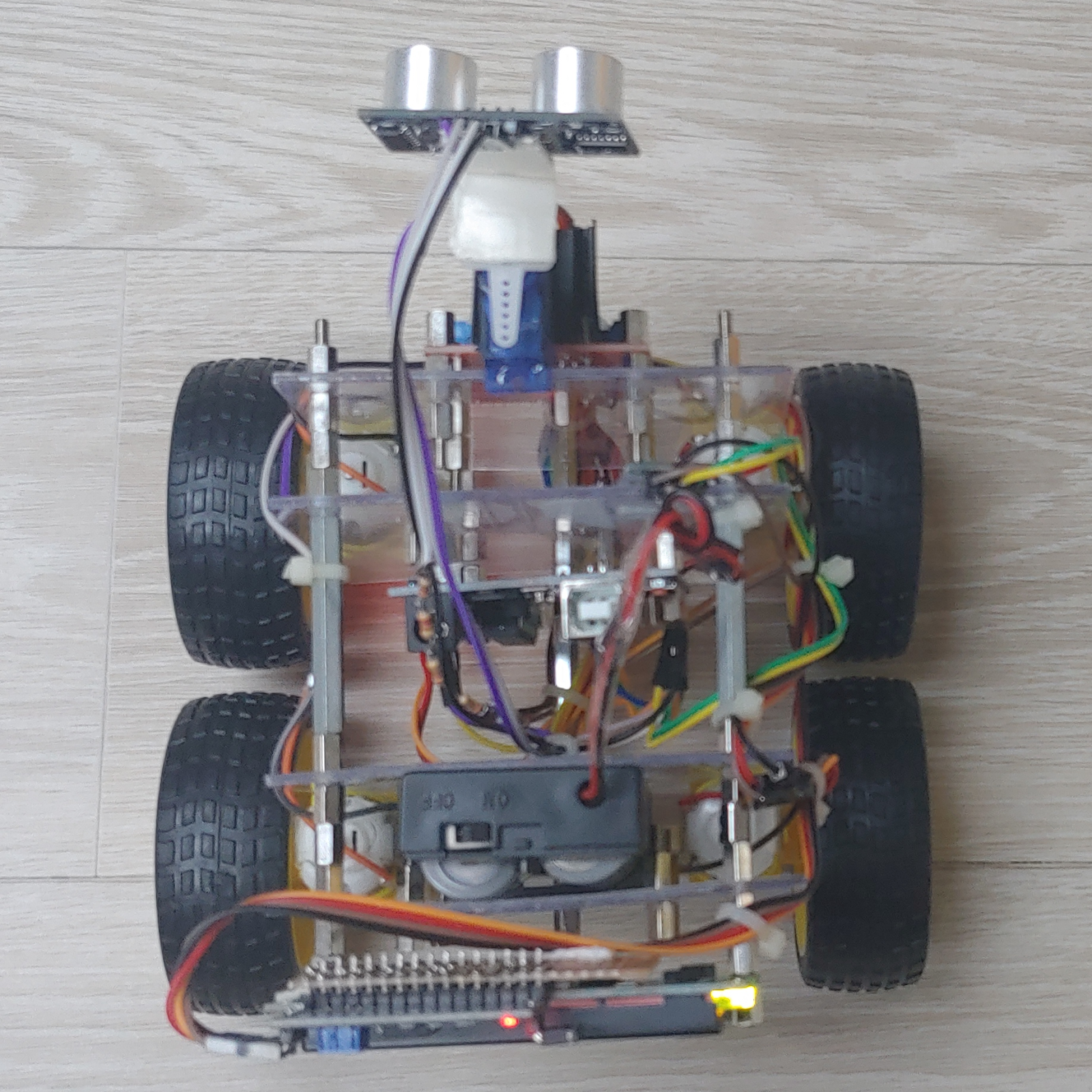
* AutoRobot
* made by Sohyemini
* 2020.10.04
******************************************************/
#include <Servo.h>
#include <SoftwareSerial.h>
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
/*
* 두 개의 바퀴를 위한 디지털 Input/output D1에서 D4까지 선언
* D1, D2는 왼쪽 바퀴, D3, D4는 오른쪽 바퀴임
*/
int LeftWheel_D1 = 2;
int LeftWheel_D2 = 3;
int RightWheel_D3 = 4;
int RightWheel_D4 = 5;
// 초음파 센서를 움직이기 위한 서보 모터 핀 번호
int ServoPin = 6;
Servo servo;
// 적외선 장애물 감지 센서는 디지털 7번 핀으로 설정합니다.
int infrared = 7;
// 정면, 좌, 우의 물체 거리를 저장할 변수
float distanceFront;
float distanceLeft;
float distanceRight;
// 초음파 센서 각각의 핀 번호, 거리 측정을 위함
int echoPin = 9;
int trigPin = 8;
// 장애물이 이 범위에 들어오면 방향을 틀어야 함
// 단위는 센티미터
#define STOP_DISTANCE 40
//Bluetooth setup
SoftwareSerial BT(10,11); //rx, tx
// 리모컨을 사용할 것인지, 자동 주행을 할 것인지?
// 디폴트는 리모컨 사용
bool Auto_Drive = false;
// 0x27 I2C 주소를 가지고 있는 16x2 LCD객체를 생성합니다.(I2C 주소는 LCD에 맞게 수정해야 합니다.)
LiquidCrystal_I2C lcd(0x27, 16, 2);
/*
* 로봇의 이동을 담당할 함수 선언 및 delay 선언
*/
void Robot_Stop();
void Robot_Go();
void Robot_RightTurn();
void Robot_LeftTurn();
void Robot_180Turn();
void Robot_Back();
void Detect_Front();
void Detect_Object();
void I2C_Address_Check(); // I2C_Address 확인
void printLCD1(String str);
void printLCD2(String str);
/*
* 초기화 함수로 아두이노 시작하고 단 한번만 동작됨
*/
void setup() {
// 디버깅 메시지를 보기 위한 Serial 초기화
Serial.begin(9600);
//Serial.println("");
while(!Serial);
BT.begin(9600);
// 휠의 핀 모드를 정의함
pinMode(LeftWheel_D1, OUTPUT);
pinMode(LeftWheel_D2, OUTPUT);
pinMode(RightWheel_D3, OUTPUT);
pinMode(RightWheel_D4, OUTPUT);
// 모든 휠을 정지상태로 초기화 한다
Robot_Stop();
// 서보 모터 초기화
servo.attach(ServoPin);
servo.write(90); // 정면을 바라보도록 설정
// 초음파 센서의 핀 모드 설정
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
// 적외선 장애물 감지 센서 핀을 INPUT으로 설정합니다.
pinMode(infrared, INPUT);
//Wire.begin();
// I2C LCD를 초기화 합니다..
lcd.init();
// I2C LCD의 백라이트를 켜줍니다.
lcd.backlight();
//1초 쉼
delay(1000);
Detect_Front();
}
void loop() {
I2C_Address_Check(); // I2C address check
/*
if (BT.available()) {
Serial.write(BT.read());
}
if (Serial.available()) {
BT.write(Serial.read());
}
return;
*/
// 적외선 감지 센서 부터 센서값을 읽습니다.
// 감지되면 0, 감지되지 않으면 1이 나옵니다.
int state = digitalRead(infrared);
if(state == 0 && Auto_Drive)
{
Robot_Back();
delay(200);
Robot_180Turn();
return;
}
// 측정된 센서값을 시리얼 모니터에 출력합니다.
/*
Serial.print("Infrared = ");
Serial.println(state);
return;
*/
bool bBT = BT.available();
if(!Auto_Drive)
{
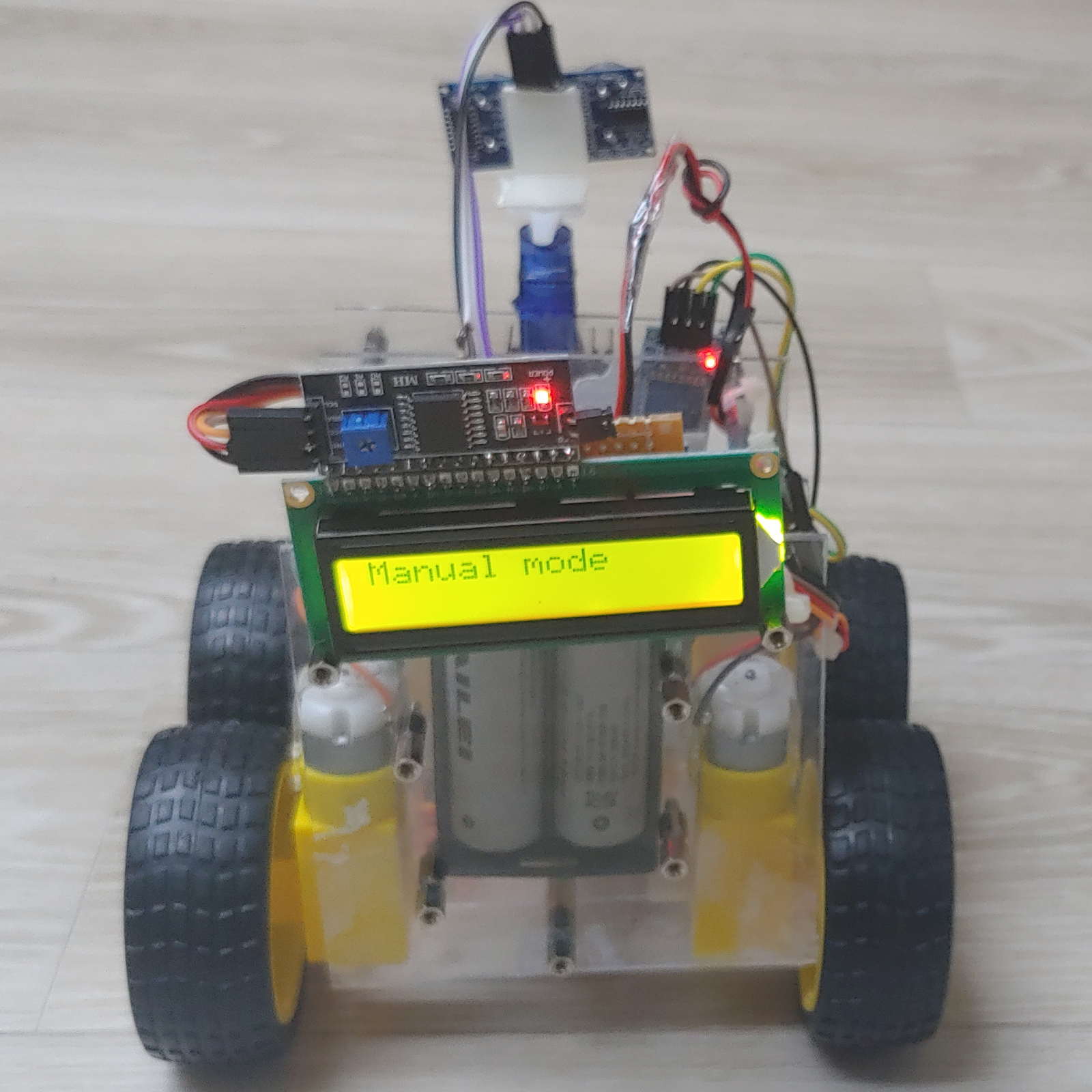
printLCD1("Manual mode");
switch(BT.read())
{
case 'a':
Serial.println("Stop Btn");
printLCD2("Stop");
Robot_Stop();
break;
case 'b':
Serial.println("Right Btn");
printLCD2("Turn Right");
Robot_RightTurn();
break;
case 'c':
Serial.println("Left Btn");
printLCD2("Turn Left");
Robot_LeftTurn();
break;
case 'd':
Serial.println("Go Btn");
printLCD2("Go Go ...");
Robot_Go();
break;
case 'e':
Serial.println("Back Btn");
printLCD2("Back ...");
Robot_Back();
break;
case 'o':
Serial.println("# Btn / 매뉴얼 모드");
Auto_Drive = false;
break;
case 'p':
Serial.println("* Btn / 오토 모드");
Robot_Stop();
Detect_Object();
Auto_Drive = true;
break;
}
} else {
printLCD1("Auto Drive Mode");
printLCD2("Made by SoHyeMin");
if('o' == BT.read()){
Serial.println("# Btn / 매뉴얼모드");
Auto_Drive = false;
Robot_Stop();
return;
}
// 자율주행 모드
if(distanceFront > STOP_DISTANCE) // 정의된 거리보다 크면 앞으로 전진하고 물체 확인
{
Robot_Go();
} else { // 정면의 거리가 정의된 거리보다 작을 경우
Detect_Object(); // 좌우의 거리를 구한다
// 둘다 지정거리보다 작으면
if (distanceRight < STOP_DISTANCE && distanceLeft < STOP_DISTANCE){
Robot_180Turn(); // 180도 회전
}
else {
if(distanceRight >= distanceLeft) // 오른쪽 거리가 더 멀면
Robot_RightTurn(); // 우회전
else // 왼쪽 거리가 더 멀면
Robot_LeftTurn(); // 좌회전
}
}
Detect_Front(); // 정면 거리 측정
}
}
/*
* 로봇을 180도 회전시킨다
*/
void Robot_180Turn(){
Serial.println("로봇 180도 회전");
digitalWrite(LeftWheel_D1, HIGH);
digitalWrite(LeftWheel_D2, LOW);
digitalWrite(RightWheel_D3, LOW);
digitalWrite(RightWheel_D4, HIGH);
delay(530);
Robot_Stop();
delay(250);
}
/*
* 로봇을 오른쪽으로 회전시킨다
*/
void Robot_RightTurn(){
Serial.println("로봇 우회전");
digitalWrite(LeftWheel_D1, HIGH);
digitalWrite(LeftWheel_D2, HIGH);
digitalWrite(RightWheel_D3, HIGH);
digitalWrite(RightWheel_D4, LOW);
//if(Auto_Drive)
{
delay(300);
Robot_Stop();
delay(250);
}
}
/*
* 로봇을 왼쪽으로 회전시킨다
*/
void Robot_LeftTurn(){
Serial.println("로봇 좌회전");
digitalWrite(LeftWheel_D1, HIGH);
digitalWrite(LeftWheel_D2, LOW);
digitalWrite(RightWheel_D3, HIGH);
digitalWrite(RightWheel_D4, HIGH);
//if(Auto_Drive)
{
delay(300);
Robot_Stop();
delay(250);
}
}
/*
* 로봇을 정지킨다
*/
void Robot_Stop(){
Serial.println("로봇 멈춤");
digitalWrite(LeftWheel_D1, HIGH);
digitalWrite(LeftWheel_D2, HIGH);
digitalWrite(RightWheel_D3, HIGH);
digitalWrite(RightWheel_D4, HIGH);
}
/*
* 로봇이 앞으로 간다
*/
void Robot_Go(){
Serial.println("로봇 전진");
digitalWrite(LeftWheel_D1, HIGH);
digitalWrite(LeftWheel_D2, LOW);
digitalWrite(RightWheel_D3, HIGH);
digitalWrite(RightWheel_D4, LOW);
if(Auto_Drive)
{
delay(300);
Robot_Stop();
}
}
/*
* 로봇을 뒤로 움직인다
*/
void Robot_Back(){
Serial.println("로봇 후진");
digitalWrite(LeftWheel_D1, LOW);
digitalWrite(LeftWheel_D2, HIGH);
digitalWrite(RightWheel_D3, LOW);
digitalWrite(RightWheel_D4, HIGH);
}
/*
* 초음파 센서의 거리를 구하는 함수
*/
float sensor_distance() {
float distance = 0;
// 트리거 핀을 이용해 초음파를 내 보내고 대기 모드로 전환
digitalWrite(trigPin, HIGH);
delayMicroseconds(20);
digitalWrite(trigPin, LOW);
// 초음파가 들어온 시간, 마이크로 초
// 초당 340 미터를 이동하는데 여기서는 마이크로 초이고
// 왕복 거리이므로 2로 나눠준다.
// 복잡하므로 58.5로 나눠도 된다.
distance = pulseIn(echoPin, HIGH) / 58.8;
return distance;
}
/*
* 좌, 우 거리를 각각 구한다
*/
void Detect_Object(){
servo.write(0);
delay(250);
distanceRight = sensor_distance();
servo.write(179);
delay(250);
distanceLeft = sensor_distance();
}
/*
* 정면의 거리를 구한다
*/
void Detect_Front(){
servo.write(90);
delay(250);
distanceFront = sensor_distance();
}
/*
* I2C의 번지수를 구한다.
* 한번 사용 후에는 함수가 호출 된 후 바로 return 하여
* 동작을 하지 않도록 설정함
*/
void I2C_Address_Check(){
return;
byte error, address;
int nDevices;
Serial.println("Scanning...");
nDevices = 0;
for(address = 1; address < 127; address++ )
{
Wire.beginTransmission(address);
error = Wire.endTransmission();
if (error == 0)
{
Serial.print("I2C device found at address 0x");
if (address<16)
Serial.print("0");
Serial.print(address,HEX);
Serial.println(" !");
nDevices++;
}
else if (error==4)
{
Serial.print("Unknow error at address 0x");
if (address<16)
Serial.print("0");
Serial.println(address,HEX);
}
}
if (nDevices == 0)
Serial.println("No I2C devices found\n");
else
Serial.println("done\n");
delay(5000);
}
void printLCD1(String str){
// 0번째 줄 0번째 셀부터 입력하게 합니다.
lcd.setCursor(0,0);
// 첫 문장을 출력합니다.
lcd.print(str);
for(byte i = str.length(); i < 16; i++)
lcd.write(' ');
}
void printLCD2(String str){
// 1번째 줄 0번째 셀부터 입력하게 합니다.
lcd.setCursor(0,1);
// 두 번째 문장을 출력합니다.
lcd.print(str);
for(byte i = str.length(); i < 16; i++)
lcd.write(' ');
}
반응형
'IT' 카테고리의 다른 글
| [Python] 문자열 추출하기 (0) | 2023.03.18 |
|---|---|
| [Python] PDF에서 정보 추출하기 (RPA) (1) | 2023.03.18 |
| #11/12 아두이노 로봇 HowTo (2) | 2022.11.04 |
| #10/12 아두이노 로봇 HowTo (0) | 2022.11.04 |
| #9/12 아두이노 로봇 HowTo (0) | 2022.11.04 |




댓글