이번은 inmoov에서 Hand and Forarm과정을 진행한다.
https://inmoov.fr/hand-and-forarm/
Hand and Forarm – InMoov
Download STL files from the Gallery. Before printing all the parts you should print the CALIBRATOR, to check if your parts will fit together. If you have a very hard time putting those parts together, you need to review your printer calibration settings. H
inmoov.fr
필라멘트는 ESUN PLA White를 이용했고, 에폭시 본드가 필요하다.
inmoov에서는 다음과 같이 오른쪽 손과 팔을 만들기 위해 3D 프린터로 프린팅 해야 할 목록을 다음과 같이 리스팅 해 놓았다.
오른쪽 팔에 해당하는 부품들 리스트라고 표시를 해 놓았는데 난 왼쪽팔로 시작을 한다. 언제나 그렇듯이 시키는대로 하면 별로 재미가 없다.
- 1x Thumb
- 1x Index
- 1x Majeure
- 1x RingFinger
- 1x Auriculaire (Pinky)
- 1x Bolt_entretoise
- 1x Wristlarge
- 1x Wristsmall
- 1x topsurface
- 1x coverfinger
- 1x robcap3
- 1x robpart2
- 1x robpart3
- 1x robpart4
- 1x robpart5
- 1x ElbowShaftGear (if you built the bicep)
오른쪽 손목을 위한 리스트, 하지만 난 왼쪽
- 1x rotawrist2
- 1x rotawrist1
- 1x rotawrist3
- 1x WristGears
- 1x CableHolderWrist
전체를 다 프린팅 하려면 며칠이 걸릴 것이다. 그리고 조립을 하는데 꽤 시간이 걸릴지도 모르겠다. 그러면서 블로그에 올리기 위해서 사진을 찍는 과정은 빼 먹는 부분도 많을 것 같기도 하고.....
어쨌거나 난, inmoov에서 안내하는 사진을 보고 부품을 하나씩 프린트해서 바로 조립하는 순서로 진행을 해 보려고 한다. 그러면 아마도 하루에 한 두 개의 부품이 프린트 되고 진행도 더디겠지만 말이다. 그리고 #1에서 언급한 바와 같이 서보 모터도 시키는대로 쓸 것이 아니기 때문에 차근차근 천천히 만들어 볼 예정이다.
왼쪽 손이니 다음의 링크로 이동을 해서 STL 파일을 다운로드 받아야 한다.
http://inmoov.fr/inmoov-stl-parts-viewer/?bodyparts=Left-Hand
InMoov body parts library : – InMoov
inmoov.fr
그리고 친철하게도 프린팅 할 때, 옵션도 지정을 해 주고 있다. 알 수 없는 영어 단어도 있다. inmoov 제작자가 프랑스 분이라 그렇다. 불어가 아닌게 어딘가 싶기도 하다. wristarge, wristsmall(손목과 손바닥 어딘가 쓰일 것 같이 생긴 부품)과 Thumb은 infill 30%, wall thickness 2mm 그리고 no support, no raft로 3D 프린터를 설정을 하라고 한다.
index3, majeure3, ringfinger3, auriculaire3는 앞과 동일하게 하고 wall thickness는 1.5mm 그리고 no brim을 추천한다.
대부분은 위의 추천을 따르면 될 것 같다. 아무래도 wall thickness가 두꺼울수록 튼튼하지 않을까 싶다. 난 추천을 그대로 따르진 않고 infill을 25%로 했다. 마지막으로 기어 부분에 대해서는 프린터가 갖고 있는 최고의 품질로 프린트를 하라고 조언을 하고 있다. 아무래도 움직이는 부분이라 그렇지 않을까 싶다. 여기에 한가지 더 이야기를 하는데 각각의 부품들을 조립할 때 볼트를 쓰게 되는데 손가락을 조립할 때는 16x3mm 볼트 보다는 필라멘트를 이용하는 것도 괜찮다고 조언한다. 이미 앞서 만든 손가락 테스트에서 사용해 봤는데 본드로 붙이면 되더라.
그리고 다음과 같이 볼트가 필요하다고 써 놨는데 만들면서 어떤 것이 필요한지 나는 추천하는 것 대신에 어떤 것을 쓸 것인가는 하나씩 진행하면서 다시 살펴보자.
- wristlarge와 wristsmall를 붙일 때 : 1x8mmx8cm
- wriarge와 thumbbottom를 붙일 때 : 1x8mmx4cm
- wriarge와 robpart1을 붙일 때 : 1x8mmx6cm
- 손가락들의 힌지를 붙일 때 : 16x3mmx2cm
홈 페이지에서는 오른쪽 손을 조립하는 과정을 보여주고서 왼쪽을 조립할 때는 오른쪽 손 조립을 하는 과정을 보고 따라하라고 얘기를 한다. 그런데 대충 살펴본 결과 좀 부실해 보인다. 내가 여기에 써 내려갈 과정은 홈페이지에서 안내하는 것에 대한 보충이 되지 않을까?
드디어 시작이다. RobPart2, 3, 4 그리고 5를 프린트해서 조립하는 것이 시작이다.
Step1.
프린팅은 다음 네 개의 부품을 하면된다. 바로 위에 있는 링크를 따라가면 보인다. v4인 것으로 봐서 몇 번의 업그레이드가 진행 된 것을 알 수 있다.
서보 베드는 말 그대로 서보모터를 고정시키는 부분인데 내가 사용하고자 하는 서보모터는 inmoov에서 추천하는 것이 아니라 RC Plane에 쓰는 작은 서보모터 SG90이다. 구매는 알리익스프레스를 이용했다.
https://ko.aliexpress.com/item/33009883276.html?spm=a2g0s.9042311.0.0.58a64c4dHhhXTO
6786.0₩ |SG90 9G 마이크로 미니 서보 뿔 SG90 서보 RC 250 450 헬리콥터 비행기 자동차 선박 보트 로봇
Smarter Shopping, Better Living! Aliexpress.com
ko.aliexpress.com

네 개를 한꺼번에 프린트하지 않았고 2번과 5번을 붙이는 과정이 제일 먼저 나와서 두 개를 먼저 프린팅을 했다. 두 개를 프린팅 하는데도 17시간이 걸렸다. Cura에서 여러가지 옵션을 보면서 가장 시간이 적게 걸리는 것으로 했음에도 그랬다.
3, 4 번을 Cura에서 작업한 파일은 아래와 같다. Support를 하지 말라고 했는데 아직까지 Ender 3 프린터에 대해서 잘 모르는 관계로, 3D 프린팅을 많이 해 보지 않은 관계로 Tree type의 support를 세웠다. 대략 12시간 이후에나 결과물을 볼 수 있겠다. 아래 Cura의 화면에서 파란색 부분은 supprt를 지운 흔적들이다.

그리고 먼저 프린틀를 해 놓은 2번과 5번은 다음과 같이 본드로 붙였다. 꼭 에폭시를 쓰기를 추천한다. 일반적인 순간접착제는 쉽게 떨어진다. 에폭시는 PLA를 약간 녹이면서 붙이기 때문에 아주 튼튼하다. RC 비행기의 날개도 에폭시 본드를 이용해서 붙였다. 그만큼 튼튼하지 않을까 싶다.

3, 4번을 프린트를 하는데만 시간이 많이 걸렸지 조립이랄 것도 없이 두 개를 본딩하는 것이 전부이다.

2, 5와 3, 4를 합하면 팔뚝 부분이 완성이 된다. 그냥 대보기만 한 것이다. 접착제로 붙이면 곤란해진다.

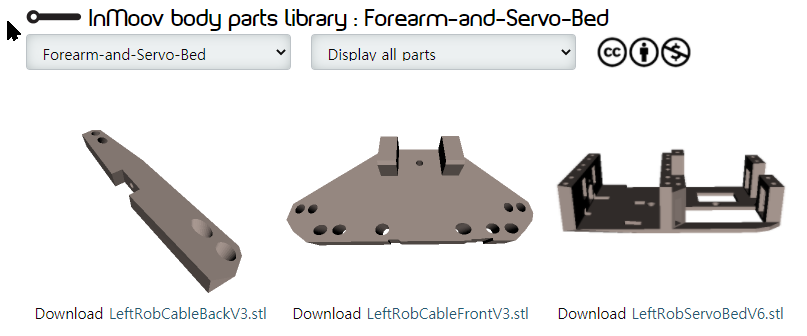
다음은 서보 모터를 장착할 모터베드를 출력을 해야 한다. 갤러리로 들어가서 LeftRobServoBedV6.stl을 다운로드 받으면 된다.

홈 페이지에서는 오른쪽 손을 조립하는 과정을 보여주고서 왼쪽을 조립할 때는 오른쪽 손 조립을 하는 과정을 보고 따라하라고 얘기를 한다. 그런데 대충 살펴본 결과 좀 부실해 보인다. 내가 여기에 써 내려갈 과정은 홈페이지에서 안내하는 것에 대한 보충이 되지 않을까?
드디어 시작이다. RobPart2, 3, 4 그리고 5를 프린트해서 조립하는 것이 시작이다.
Step1.
프린팅은 다음 네 개의 부품을 하면된다. 바로 위에 있는 링크를 따라가면 보인다. v4인 것으로 봐서 몇 번의 업그레이드가 진행 된 것을 알 수 있다.
서보 베드는 말 그대로 서보모터를 고정시키는 부분인데 내가 사용하고자 하는 서보모터는 inmoov에서 추천하는 것이 아니라 RC Plane에 쓰는 작은 서보모터 SG90이다. 구매는 알리익스프레스를 이용했다.
https://ko.aliexpress.com/item/33009883276.html?spm=a2g0s.9042311.0.0.58a64c4dHhhXTO
6786.0₩ |SG90 9G 마이크로 미니 서보 뿔 SG90 서보 RC 250 450 헬리콥터 비행기 자동차 선박 보트 로봇
Smarter Shopping, Better Living! Aliexpress.com
ko.aliexpress.com
큰 서보모터 대신에 작은 놈을 사용해야 하니 서보 마운트를 별도로 디자인해야 한다. 프린트가 되면 다음 스텝으로 넘어가기 위해서는 마운트를 별도로 디자인해서 사용해야 한다.
(이상 2021-08-20 작성)
서보 모터 마운트는 Tinkercad라는 웹에서 사용할 수 있는 캐드를 이용해서 만들었다. 재주가 없으니 잔머리를 썼다. 서보 모터 마운트를 불러다 놓고 각 구멍에 홀을 세워서 어렵지 않게 미니 서보 모터용 마운트를 만들었다. Tinkercad는 아주 간단하니 유튜브에서 30분 정도만 보면 쉽게 사용할 수가 있었다.

그렇게 만든 마운트와 기존 마운트는 다음과 같다. 아무리 쉽다곤 해도 두 번을 실패하고 세 번째야 성공을 했다. 만족스러운 모양이나 퀄리티는 아니지만 작동하는 inmoov를 만드는데는 아무런 지장이 없을 것 같다. 다만 서보모터의 높이가 안 맞을 경우에는 높이를 맞추기 위한 재작업이 있을 수도 있겠다는 생각이 든다.

서보 모터 마운트는 아래의 그림과 같이 장착이 된다. 화살표에 보이는 부분이 딱 맞아 들어가서 고정이 된다. 여기에 서보모터를 위치를 시켜보면 다음과 같이 잘 맞는것을 볼 수 있었다. 미니 서보용 마운트는 본 게시물에 첨부했습니다.

이젠 마운트를 할 차례다. 다음과 같이 마운트를 위치시킨다. 화살표 부분을 맞춰주고 스크류로 고정을 시킨다.
 |
 |
스크류는 3mm X 15mm 정도가 적당하다. 별도로 구매하지는 않았고 공구통을 살펴보니 있어서 그걸 이용했다.
 |
 |
다음은 RobRing, Servo-pulley는 서보 모터와 연결하는 부품이다. RobRing에는 서보 모터의 나사산과 일치하는 나사산이 준비되어 있고 Servo-pulley는 서보 모터의 구성품 중에서 동그랗게 생겨 서보모터의 나사산에 맞춰 사용할 수 있는 마운트와 결합해서 사용할 수 있는 부품이다. 따라서 둘 중에 하나만 있으면 되는데 SG90 서보모터에는 해당 부품이 없다. 그래서 RobRing을 재 작업했다. 그래서 다음에 보이는 RobRing을 만들었다.

문제는 다음에 발생을 했다. SG90 다섯 개를 모두 마운트하고 RobRing을 연결하려고 보니 세 개의 서보 모터가 있는 쪽에서 간섭이 발생해서 RobRing을 고정할 수가 없다. 그래서 별 수 없이 서보 모터 마운트를 재작업했다.

앞에 있는 마운트와 비교를 해 보면 아래쪽 세 개의 서보모터 구멍이 상하로 좌우로 좀더 벌어져 있는 것을 볼 수 있다. 이렇게 한 후에 장착을 하게 되면 다음과 같다.

서보 모터의 고정은 각 서보모터와 함께 들어 있는 나사를 이용을 했다. 그리고 서보모터의 좌측과 우측은 각각 다음의 그림에 보이는 LeftRobCableBack과 LeftRobCableFront를 프린트해서 살짝 올려만 놨다. 나중에 손가락과 연결될 낚시줄이 이동할 통로이다.
inmoov에서는 서보 모터도 0도로 정렬하라고 되어 있는데 이는 나중에 낚시줄을 연결하면서 기존에 만들었던 Starter kit에 있는 아두이노를 이용해서 할 예정이다.
inmoov 페이지를 보면 드릴을 이용해서 미리 각 부품을 다듬어주는데 지금 당장보다는 조립을 하면서 필요한 수정을 하거나 다듬는 작업을 하는 것이 좋겠다.
'3D프린팅' 카테고리의 다른 글
| [RC비행기 만들기] Shark Aero #02 (0) | 2021.08.30 |
|---|---|
| 로봇제작 #03 손과 팔 / Step 2 (0) | 2021.08.27 |
| [RC비행기 만들기] Shark Aero #01 (0) | 2021.08.14 |
| 로봇제작 #01 시작 - 손가락 샘플 (0) | 2021.08.14 |
| Ender 3 셋업 및 시험 운용 (0) | 2021.08.09 |




댓글